迈尔微视3D视觉系统解决方案 机器人3D视觉定位系统
针对散乱无序的工件堆放,我们设计了一款创新的3D智能抓取系统,助力机器人实现高效精准的抓取。该系统通过精确的3D数据扫描,实现工件的三维准确定位,从而引导机械手准确、快速地抓取并定位工件。这一突破性的设计,赋予了工业机器人自动化生产线更高的柔性工装能力。

其技术原理在于,通过高速的3D结构光成像系统,对物体表面轮廓进行细致入微的扫描,形成点云数据。这些数据经过智能分析处理,结合AI算法、机器人路径自动规划以及自动防碰撞等智能化技术,实时计算出工件的空间坐标,并精准引导机器人完成抓取任务。这一方案不仅简化了系统结构,还降低了生产成本和维护成本,使产线更具柔性,能够轻松应对不同型号产品的生产需求,同时支持用户快速添加新的型号。
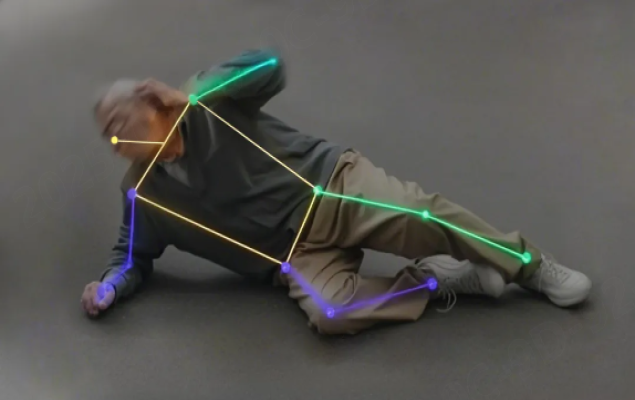
在3D视觉系统的辅助下,机器人拥有了“眼睛”与“大脑”的功能,能够智能分析工件抓取的优先级,快速精准地抓取工件,有效解决了上下层工件相互干扰的问题。这不仅提升了产品质量,还极大地解放了工人的劳动力,让他们从繁重的劳动中脱颖而出。
迈尔微视的3D视觉系统,由3D成像单元和运动路径规划单元组成,实现了对工件的精准识别和高效抓取。通过该系统,我们可以免除定位工装夹具的制作,减少人工的参与,同时利用离线编程和仿真技术,大大缩短工程时间,提高调试效率。
随着技术的快速发展,我们的解决方案也在不断进步。更快的计算程序、更精准的相机和更先进的传感器,使我们能够精准识别包装的尺寸大小、位置姿态,并通过机器人路径规划技术,实现不同尺寸货物的自动码垛。这一创新的应用,使得机器人无需针对每个品类进行编程,真正实现了“看见即规划”的目标。
在工厂流水线的包装码垛环节,我们面临着货物尺寸动态未知的挑战。通过详细介绍多品类、不同尺寸的包装通过输送带来料是码垛流程的常见方式,我们可以看到,如何实现在不了解具体尺寸和形状的情况下,让机器人自动完成码垛过程是一个重要的问题。然而,通过迈尔微视的3D视觉系统,我们可以轻松解决这一难题。
无论是电商还是医药行业,拆垛过程中经常会遇到垛形不完整、包装尺寸不一等问题。而通过3D传感器采集三维图像信息,结合3D智能软件,我们可以兼容各种尺寸的包装和不规则的垛形,实现高效、准确的拆垛过程。这一解决方案的优化计算,能够引导工业机器人轻松应对各种复杂情况,提升产线的整体效率和灵活性。
其他栏目内容

迈尔微视即将亮相泰国NEPCON Thailand 2025
诚邀您莅临NEPCON Thailand,泰国曼谷国际贸易展览中心BITEC,了解3D视觉前沿技术,...
- 2025-06-12 11:40:40
迈尔微视应邀参加AWE2025,展示dToF高精度固态激光雷达传感器S10
S10采用dToF高精度固态激光雷达技术,通过测量光脉冲的飞行时间来计算物体距离,实现高精度、高分辨...
- 2025-03-18 13:05:05