迈尔微视:详解3D视觉定位系统的工作流程
2024-04-17 01:16:25
By: 迈尔微视
3D视觉定位系统的工作流程可以概括为以下几个步骤:
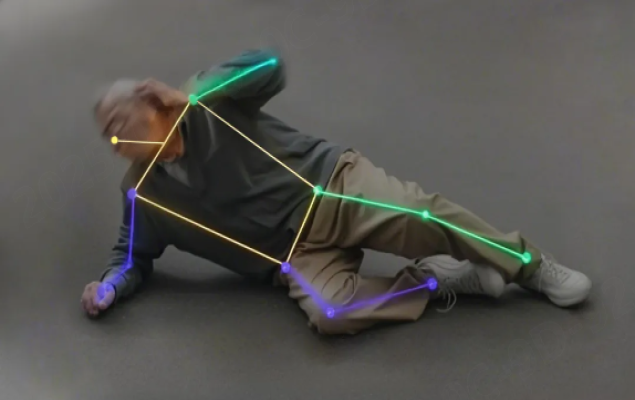
首先,系统通过摄像头捕捉目标物体的图像,这一步骤至关重要,因为它为后续的识别与定位提供了基础数据。摄像头捕捉到的图像被传输到处理单元,进行实时的图像处理和分析。

在处理单元中,图像经过一系列算法的处理,如滤波、增强和分割等,以提取出目标物体的特征信息。这些特征信息包括但不限于物体的形状、大小、颜色以及纹理等。
接下来,系统会根据提取的特征信息,与目标物体在数据库中的已知信息进行比对。这一步骤涉及到模式识别与匹配算法,通过这些算法,系统能够准确地识别出目标物体,并确定其在场景中的位置。
在确定了目标物体的位置后,3D视觉定位系统会进一步计算出目标物体的三维坐标。这一步骤依赖于精确的测量和定位算法,以确保坐标的准确性和可靠性。
最后,系统会将计算得到的三维坐标输出,供后续的应用程序使用。这些应用程序可能包括机器人导航、物体抓取、场景重建等多种场景,都依赖于3D视觉定位系统提供的位置信息。
综上所述,3D视觉定位系统的工作流程涵盖了图像捕捉、处理分析、特征提取、识别匹配以及坐标计算等多个环节。这些环节相互协作,共同实现了对目标物体的精确识别与定位,为各种应用场景提供了强大的技术支持。
浙江迈尔微视科技有限公司核心技术团队组建于2016年,致力于为移动机器人开发专用视觉传感器,提供软硬件一体的视觉解决方案。
成立至今,累计交付超万台移动机器人专用的3D视觉传感器,凭借3D+AI的深度视觉系统让移动机器人更安全、更稳定、更智能。
其他栏目内容

迈尔微视即将亮相泰国NEPCON Thailand 2025
诚邀您莅临NEPCON Thailand,泰国曼谷国际贸易展览中心BITEC,了解3D视觉前沿技术,...
- 2025-06-12 11:40:40
迈尔微视应邀参加AWE2025,展示dToF高精度固态激光雷达传感器S10
S10采用dToF高精度固态激光雷达技术,通过测量光脉冲的飞行时间来计算物体距离,实现高精度、高分辨...
- 2025-03-18 13:05:05