迈尔微视: TOF相机的介绍 分类 基本原理和优缺点
2024-05-08 10:29:58
By: 迈尔微视
ToF相机
不同于使用2D图像来推算3D资讯,ToF是透过红外光在空气中的飞行时间,计算出目标体的距离。ToF技术也是机器视觉工业的重要里程碑,因其只需要使用低成本的CMOS传感器和主动光源技术就能提供3D场景的距离景深资讯。
此外,不同于单点逐点扫描方式,ToF是每个图元都能测量对应目标体的亮度和反射回来的到达时间,从而计算出该点对应的距离景深。ToF提供了视角范围内场景的整个分辨率的距离景深资料。该技术结构简单,容易使用,不依赖环境光,且兼具高精度和高帧率。
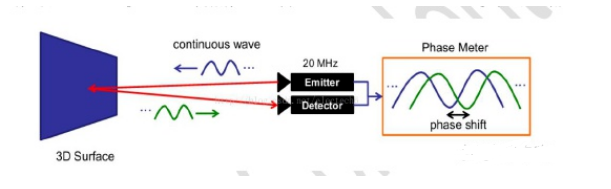
TOF法根据调制方法的不同,一般可以分为两种:脉冲调制(Pulsed Modulation)和连续波调制(Continuous Wave Modulation)。脉冲调制需要非常高精度时钟进行测量,且需要发出高频高强度激光,目前大多采用检测相位偏移办法来实现TOF功能。
下面图片描述了TOF相机(连续波)的基本原理,实际应用中,通常采用的是正弦波调制。由于接收端和发射端正弦波的相位偏移和物体距离摄像头的距离成正比,因此可以利用相位偏移来测量距离。
TOF的优缺点包括:
检测距离远。在激光能量够的情况下可达几十米。
受环境光干扰比较小。
对设备要求高,特别是时间测量模块。
资源消耗大。该方案在检测相位偏移时需要多次采样积分,运算量大。
边缘精度低。
限于资源消耗和滤波,帧率和分辨率都没办法做到较高。目前消费类最大也就VGA。
其他栏目内容

迈尔微视即将亮相泰国NEPCON Thailand 2025
诚邀您莅临NEPCON Thailand,泰国曼谷国际贸易展览中心BITEC,了解3D视觉前沿技术,...
- 2025-06-12 11:40:40
迈尔微视应邀参加AWE2025,展示dToF高精度固态激光雷达传感器S10
S10采用dToF高精度固态激光雷达技术,通过测量光脉冲的飞行时间来计算物体距离,实现高精度、高分辨...
- 2025-03-18 13:05:05