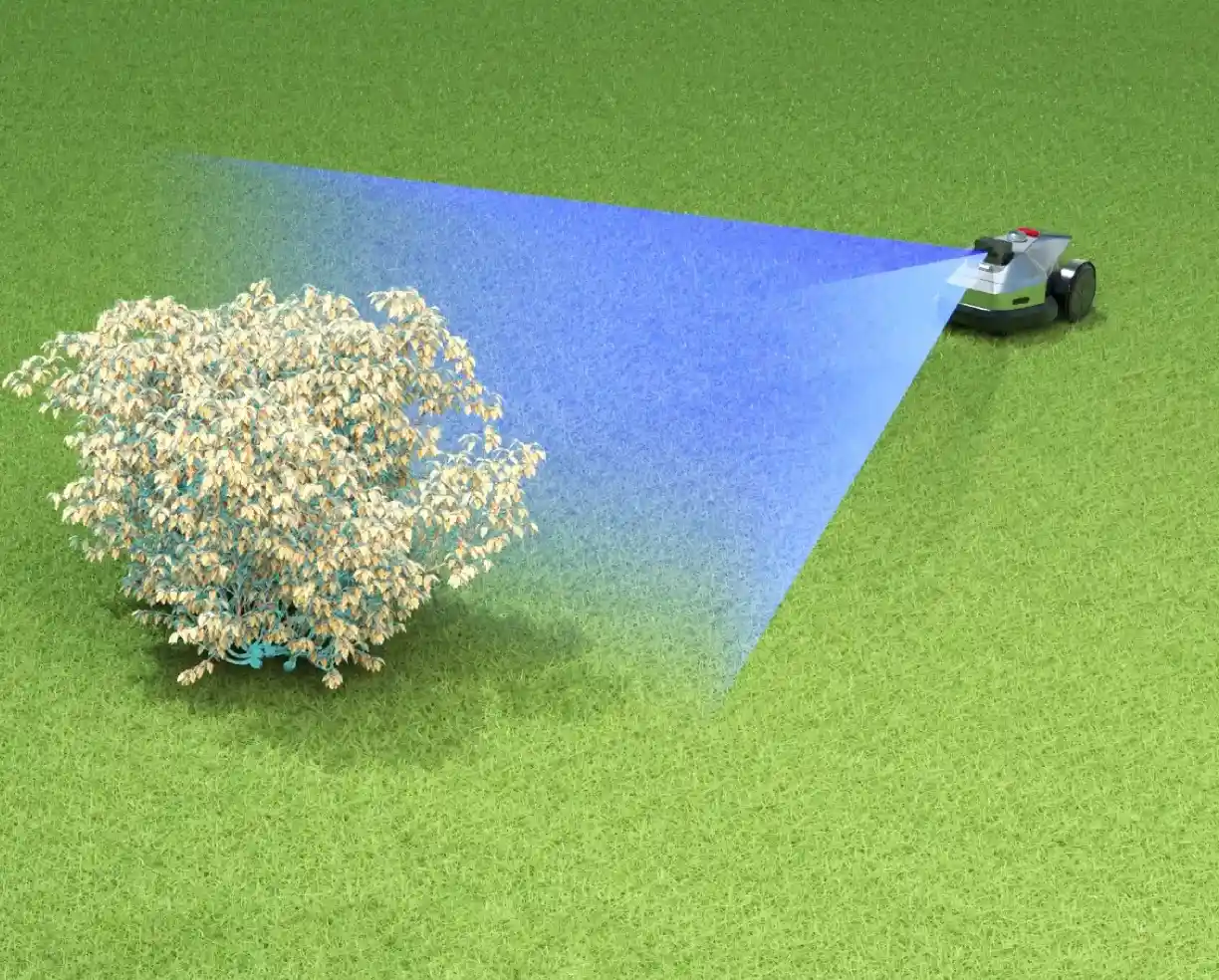
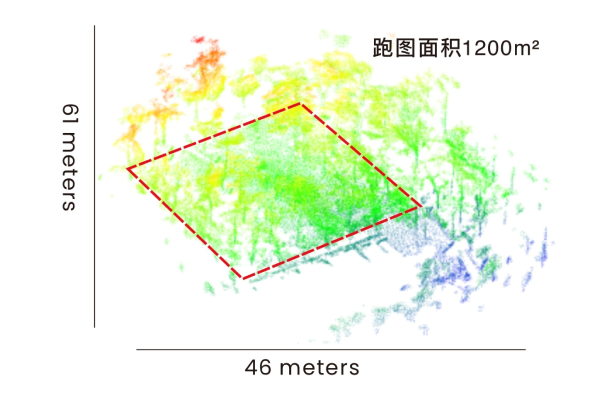
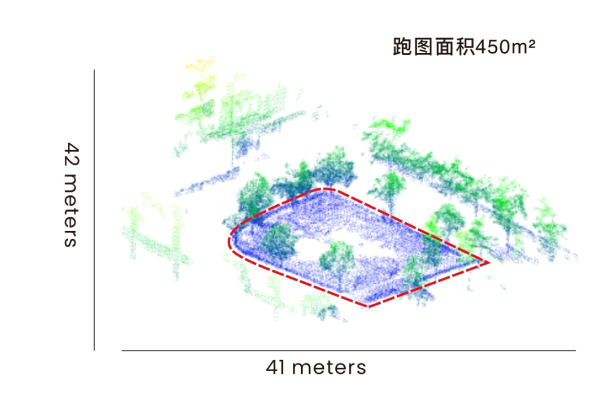
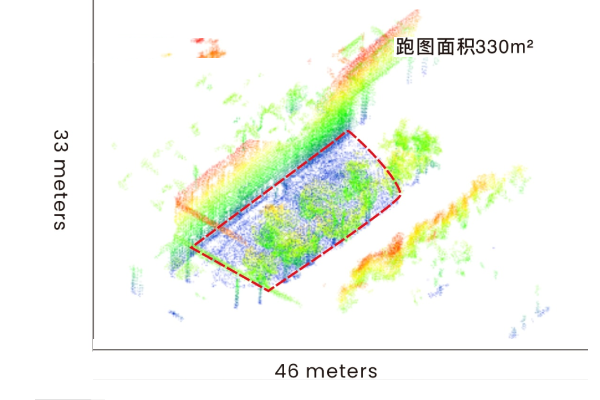
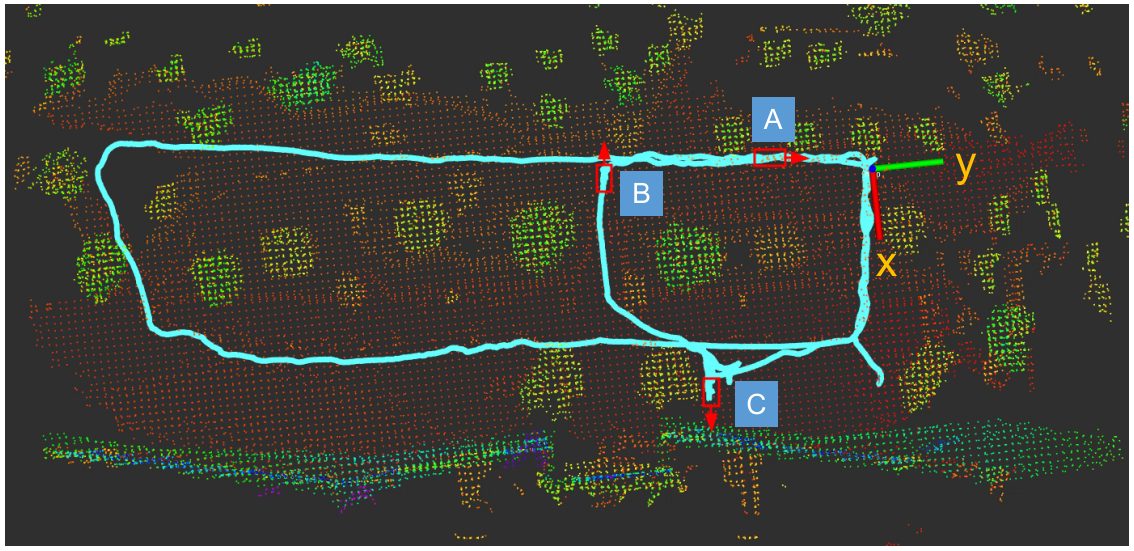
全固态激光雷达+视觉融合 融合定位、高精度视觉SLAM以及语义环境理解的完整感知方案 迈尔微视助力割草机器人 进入「全场景智能」时代! 传统方案难点 定位不准,依赖环境部署 障碍难识别,碰撞风险高 智能割草机器人感知方案 核心优势 1. 45 米长距测算 + 160 线等效点云 每秒输出超30万有效点,精准构建三维地图与地形模型,识别沟渠、斜坡、灌木等复杂地形。 2. 全场景高精度定位 深度融合激光雷达、视觉与惯性导航数据,克服单一传感器在弱纹理、强光或动态环境下的失效风险,实现复杂庭院中的厘米级稳定定位与建图。 3. 多模态感知 同步输出时空对齐的深度与彩色信息,清晰分割草坪边界,并对障碍物(如区分树木、玩具、石材)进行语义识别,为路径规划提供丰富的环境理解。 4. 灵活可扩展的硬件配置 可提供深度定制的MIPI模组,在优化系统性价比的同时,实现与割草机整机的高度一体化集成。 S系列产品详情 基于FAST-LIVO (LiDAR-Inertial-Visual Odometry) 2的智建图效果展示 大场景建图 草坪建图 室内建图 室外建图效果展示 室外定位效果展示 重复定位精度约3cm 全固态雷视一体传感器塑造全方位环境感知 360°激光雷达受限于“外置+机械旋转”设计,难以平衡感知全面性与设备可靠性。而全固态激光雷达融合视觉一体化的方案,通过嵌入式集成与无运动部件设计,不仅实现车体周边无死角感知(尤其解决低矮障碍物漏检问题),更通过“激光雷达精准测距+视觉智能识别”的双重优势,提升复杂场景(阴影、强光、复杂地形)下的环境感知精度;同时支持厘米级建图与实时定位,确保割草机在大面积草坪中规划最优路径、避免重复作业,满足“感知-建图-定位”需求。为智能割草机提供真正“省心、可靠、安全”的环境感知核心。 360°机械旋转式激光雷达 外置凸起设计:模块暴露机身外,存在碰撞、划伤风险; 下视场角不足:受安装限制,低矮障碍物(石块、树根)及草坪边缘感知易形成盲区; 旋转部件特性:机械旋转结构复杂,长期户外作业下,振动可能增加故障概率; 视觉融合繁琐:需额外配置独立视觉摄像头,并进行激光雷达与视觉的同步对齐,增加集成难度与成本。 迈尔微视全固态激光雷达融合视觉嵌入式集成:模块无缝嵌入车体,防刮耐磨,户外耐用性大幅提升;超大垂直视场:80°垂直覆盖,精准探测低矮障碍与边界,降低磕碰风险;全固态架构:无机械旋转部件,适应长期户外作业,寿命更长久;一体化视觉融合:集成视觉传感器,出厂前即完成激光雷达与视觉的底层同步对齐,降低集成难度,提升感知精度。 应用视频 多机器人混合场景方案 库位检测方案 软包拆垛方案 更多解决方案 迈尔微视专注于为具身智能机器人、割草机器人、商用清洁机器人、低速无人车、智能轮椅、工业移动机器人及其他工业场景提供3D视觉感知解决方案,助力机器人运行更安全、更稳定、更智能。 工业移动机器人 精准定位、实时避障、柔性堆垛、托盘识别 了解更多 物流仓储与自动化 体积测量、库位检测、立库监控、安全防护、软包拆垛 了解更多 人形与四足机器人 导航定位、实时避障、交互感知、精准抓取 了解更多 应用案例






")
")